Aufgabe 1: Immer in der Spur bleiben!
Abschlussbedingungen
4. Anregung: Fortgeschrittener Linienfolger für Experten
Je nach Dicke der schwarzen Linie, Fahrgeschwindigkeit, etc. bewegt sich der Roboter bei der Linienverfolgung u. U. sehr ruckelig. Dies kann man optimieren, indem der Roboter nicht feste "Rechts- und Linkskurven" fährt, sondern die jeweilige Motorgescwhindigkeit in Abhängigkeit von dem gemessenen Lichtwert dynamisch angepasst wird.
Hierbei sind mehrere Lösungsansätze denkbar:
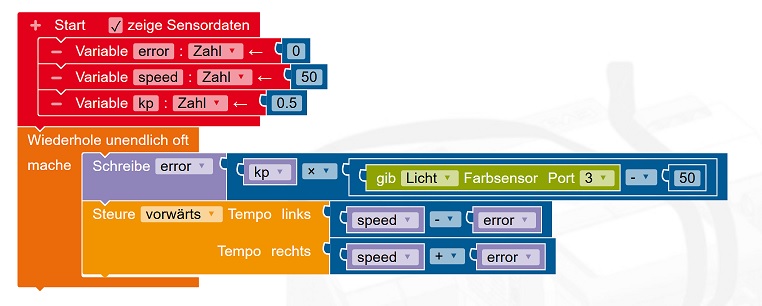
Hinweis: Ein alternativer Bearbeitungsanstz könnte hier sein, dass man den "Fortgeschrittenen Linienfolger" vorgibt und das Programm gemeinsam analysiert.
Hierbei sind mehrere Lösungsansätze denkbar:
- Aus dem vom Lichtsensor gemessenen Wert wird eine Abweichung vom Sollwert berechnet. Diese Abweichung kann zur/von der Standardgeschwindigkeit des rechten bzw. linken Motors addiert/subtrahiert werden.
- Fahren mit zwei nebeneinander angebrachten Lichtsensoren, deren Messwerte als Eingangswert für die Moterleistung verwendet werden (Dies ist in der Simulation durch die vorgegebenen Sensoren nicht umsetzbar). Über mathematische Funktionen können die Messwerte angepasst werden.
Hinweis: Ein alternativer Bearbeitungsanstz könnte hier sein, dass man den "Fortgeschrittenen Linienfolger" vorgibt und das Programm gemeinsam analysiert.
{kind=link}