Aufgabe 1: Immer in der Spur bleiben!
| Website: | Lernplattform ALP |
| Kurs: | Open Roberta 2.0 |
| Buch: | Aufgabe 1: Immer in der Spur bleiben! |
| Gedruckt von: | Gast |
| Datum: | Donnerstag, 25. Dezember 2025, 14:14 |
1. Zielsetzung
Bereits seit einiger Zeit gibt es in einigen PKWs sogenante Fahrspurassistenten, die z.B. feststellen, wenn der Fahrer auf der Autobahn die durchgezogenen Fahrbahnmarkierung am Rand überfährt.
Auch unser Roboter kann sich mit Hilfe seiner Sensoren an einer Linie orientieren.
Welche Voraussetzungen muss der Roboter mitbringen, damit er der schwarzen Linie folgen kann?
2. Wie sieht der Farbsensor seine Umwelt?
Damit wir erkennen, wie unser Roboter seine Umwelt mittels seines Farbsensors wahrnimmt, benötigen wir ein Programm:- Dieses soll den Lichtwert (Intensität des reflektierten Lichts) des Farbsensors im Display des virtuellen EV3-Stein ausgeben.
- Wenn sich der Untergrund verändert, soll das Programm auch den daraus resultierenden neuen Wert anzeigen.
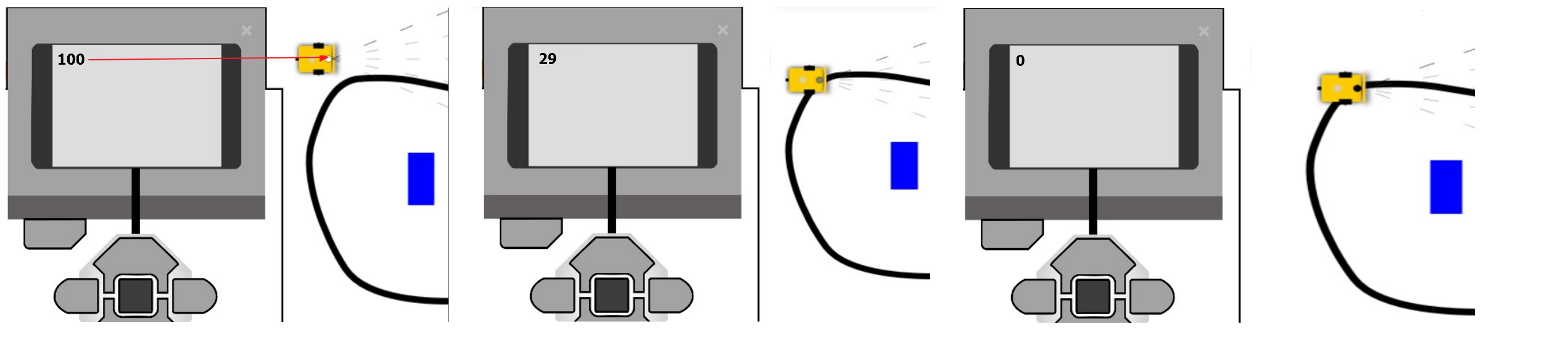
Der Sensor erfasst: weißen Untergrund, Übergang von schwarz auf weiß sowie schwarzen Untergrund.
Lösungsvorschlag
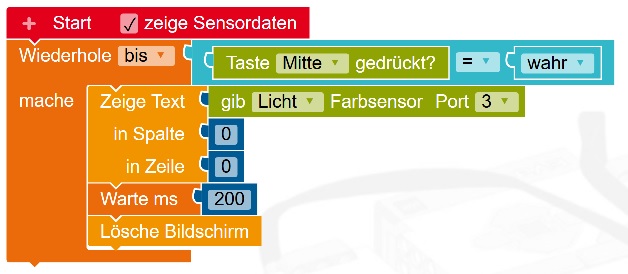
Kommentare:
- Die "Warte ms 200"-Anweisung dient der besseren Lesbarkeit.
- Die "Lösche Bildschirm"-Anweisung wird benötigt, damit sich ändernde Werte sich nicht gegenseitig überschreiben.
3. Einfacher Linienfolger
Ziel ist es ein einfaches Programm zu erstellen, mit dem der Roboter der schwarzen Linie folgt.
- Überlege dir dazu, wie wir die beiden Motoren in Abhängigkeit vom jeweils gemessenen Lichtwert steuern sollen.
- Die nachfolgende Animation kann dir dazu eine Anregung geben.
Solltest du keine Idee haben, wie du das Programm dazu umsetzen könntest, findest du nachfolgend mehrere Lösungsanregungen:
Lösungsanregung
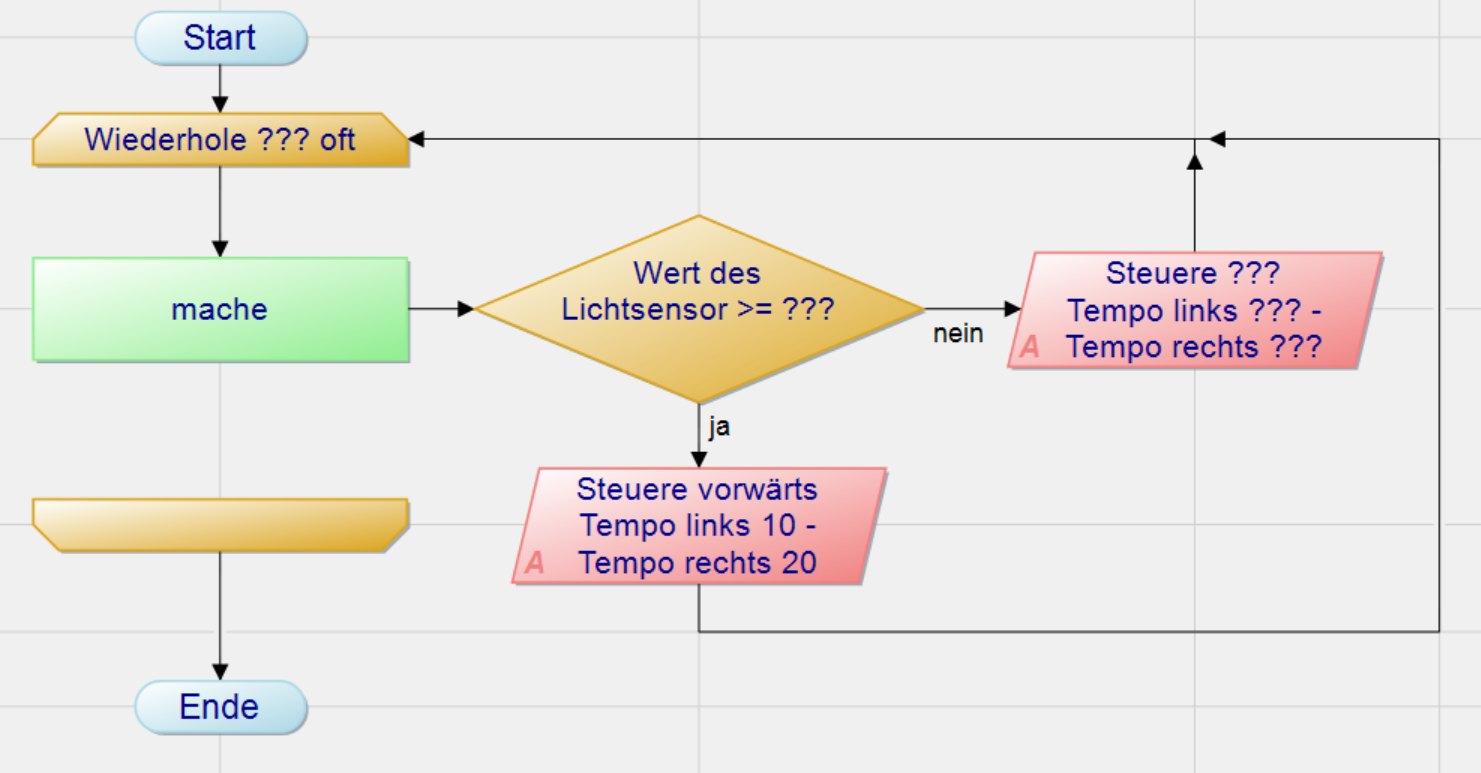
Die Abbildung zeigt dir einen noch unvollständigen Programmablaufplan. Überlege dir zunächst, welche Angaben noch fehlen, übertrage dann den vollständigen Ablaufplan auf ein Blatt Papier und erstelle dann mit dessen Hilfe das Programm.
Lösungsanregung
Die Abbildung zeigt dir einen noch unvollständigen Programmablaufplan. Überlege dir zunächst, welche Angaben noch fehlen, übertrage dann den vollständigen Ablaufplan auf ein Blatt Papier und erstelle dann mit dessen Hilfe das Programm.
Zusätzlicher Tipp:
Lass den Roboter in Abhängigkeit des gemessenen Lichtwertes eine leichte Rechts- oder bzw, Linkskurve fahren. Die Entscheidung, ob eine Rechts- oder Linkskurve gefahren wird, soll unendlich oft und immer wieder hintereinander getroffen werden.
Lösungsanregung
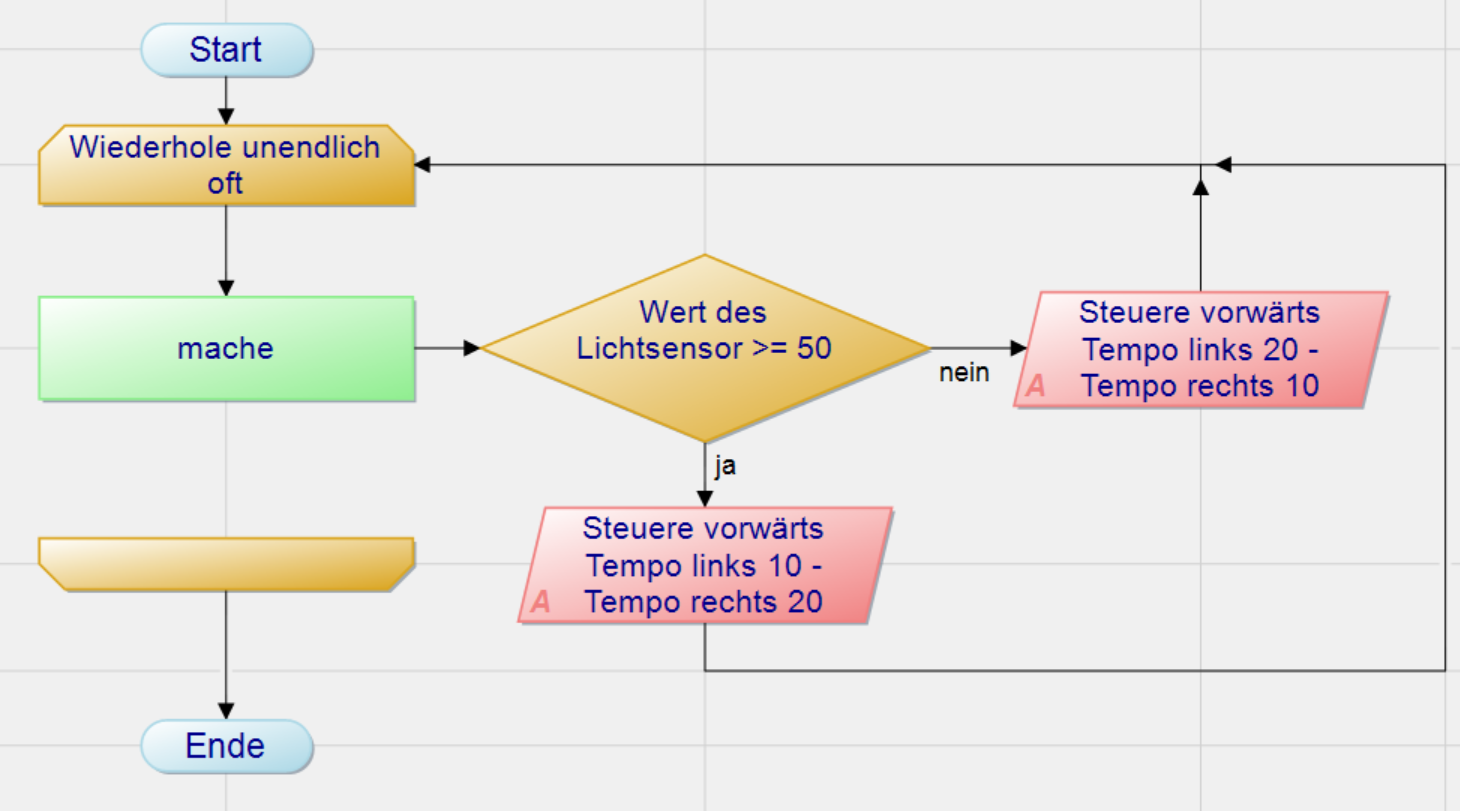
Die Abbildung zeigt dir einen möglichen Programmablaufplan zur Lösung der Aufgabe. Übertrage diesen auf ein Blatt Papier und erstelle dann mit dessen Hilfe das Programm.
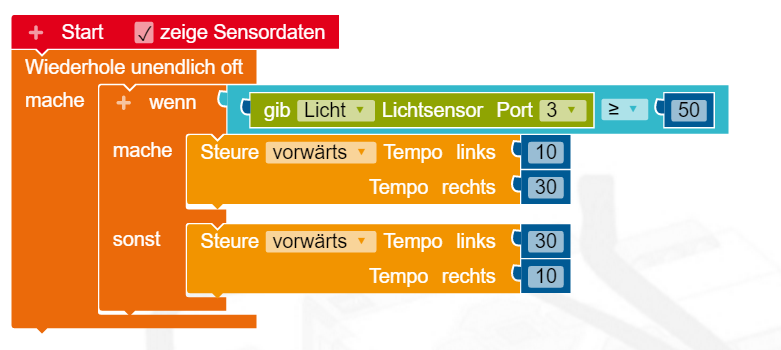
3.1. Mgl. Lösung
Mögliche Lösung
4. Anregung: Fortgeschrittener Linienfolger für Experten
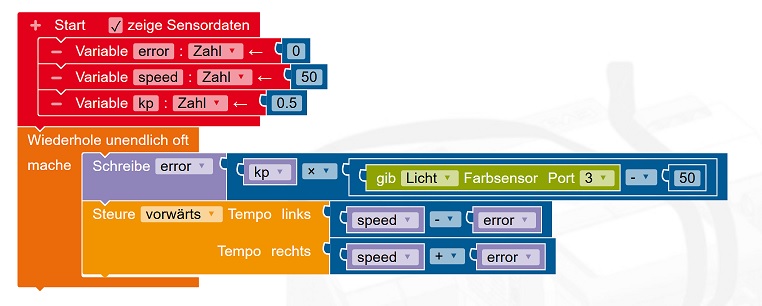
Je nach Dicke der schwarzen Linie, Fahrgeschwindigkeit, etc. bewegt sich der Roboter bei der Linienverfolgung u. U. sehr ruckelig. Dies kann man optimieren, indem der Roboter nicht feste "Rechts- und Linkskurven" fährt, sondern die jeweilige Motorgescwhindigkeit in Abhängigkeit von dem gemessenen Lichtwert dynamisch angepasst wird.Hierbei sind mehrere Lösungsansätze denkbar:
- Aus dem vom Lichtsensor gemessenen Wert wird eine Abweichung vom Sollwert berechnet. Diese Abweichung kann zur/von der Standardgeschwindigkeit des rechten bzw. linken Motors addiert/subtrahiert werden.
- Fahren mit zwei nebeneinander angebrachten Lichtsensoren, deren Messwerte als Eingangswert für die Moterleistung verwendet werden (Dies ist in der Simulation durch die vorgegebenen Sensoren nicht umsetzbar). Über mathematische Funktionen können die Messwerte angepasst werden.
Hinweis: Ein alternativer Bearbeitungsanstz könnte hier sein, dass man den "Fortgeschrittenen Linienfolger" vorgibt und das Programm gemeinsam analysiert.
{kind=link}