Aufgabe 2: Nur nicht gegen die Wand fahren!
Abschlussbedingungen
2. 2 Wie sieht der Ultraschallsensor seine Umwelt?
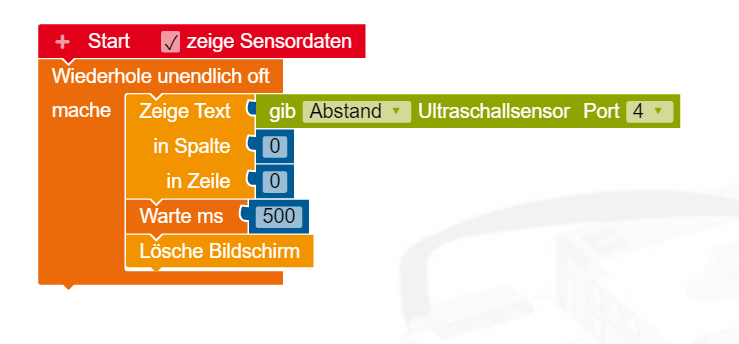
Damit wir erkennen, wie unser Roboter seine Umwelt mittels seines Farbsensors wahrnimmt, benötigen wir ein Programm:
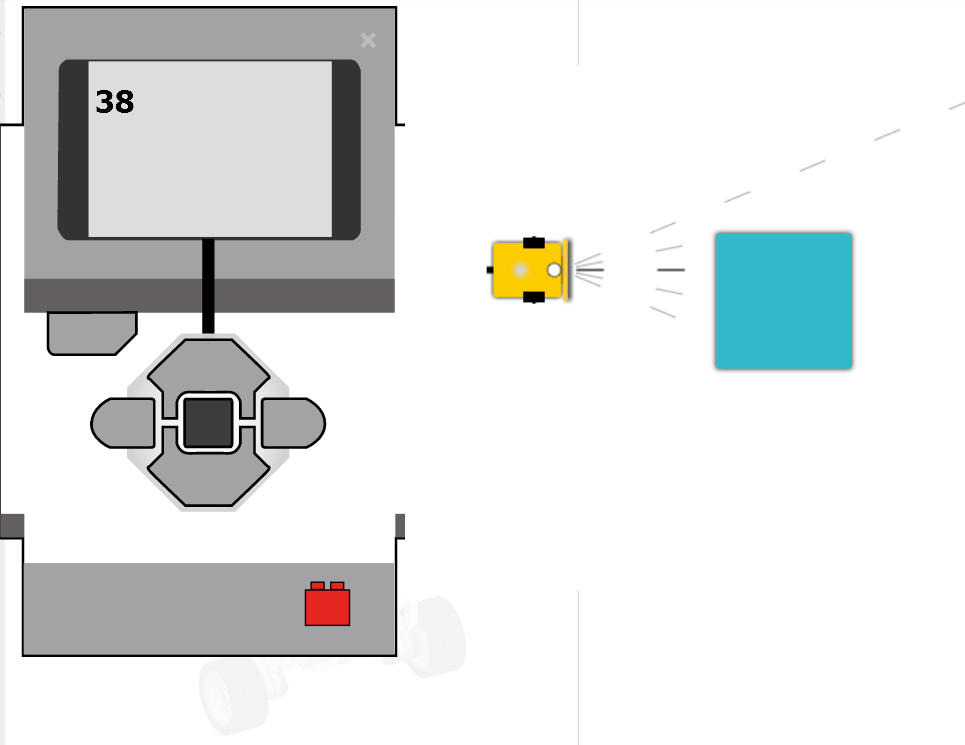
- Dieses soll den Wert des Abstands anzeigen, der zwischen dem Ultraschallsensor und dem Hindernis (verschiebbarer Block) liegt.
- Wenn sich der Abstand verändert, soll das Programm auch den daraus resultierenden neuen Wert anzeigen.
Lösungsvorschlag