Aufgabe 2: Nur nicht gegen die Wand fahren!
| Website: | Lernplattform ALP |
| Kurs: | Open Roberta 2.0 |
| Buch: | Aufgabe 2: Nur nicht gegen die Wand fahren! |
| Gedruckt von: | Gast |
| Datum: | Freitag, 9. Januar 2026, 07:47 |
Beschreibung
1. Zielsetzung

Auf einer Straße zu fahren macht Spaß - aber leider nur so lange wie kein Hindernis die freie Fahrt versperrt! Es kann jedoch schnell vorkommen, dass das eigene Fahrzeug bremsen soll, weil sich vor ihm ein Stau gebildet hat oder weil ein gefährlicher Gegenstand auf der Fahrbahn liegt.
Welche Voraussetzungen muss der Roboter - neben einem Sensor für die Linienverfolgung - mitbringen, damit er im Falle eines Hindernis auf seiner Fahrbahn automatisch stoppt?
2. 2 Wie sieht der Ultraschallsensor seine Umwelt?
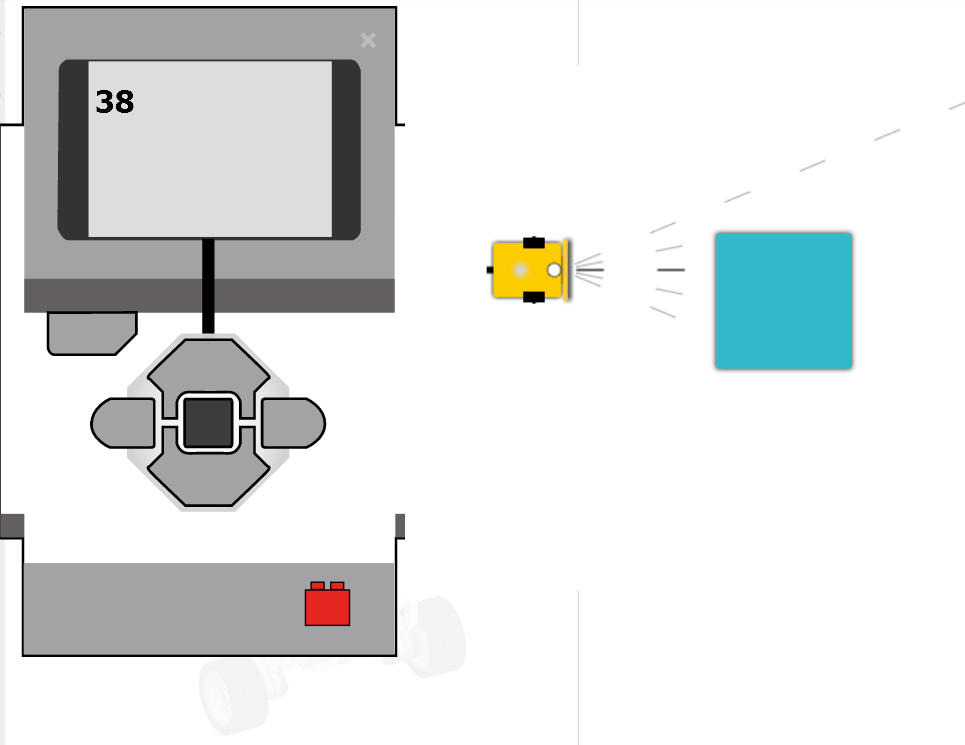
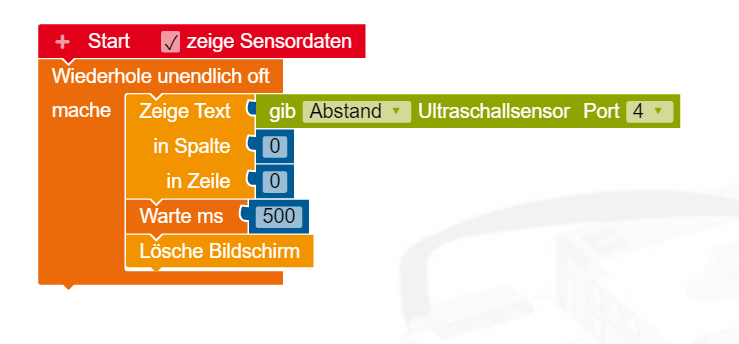
Damit wir erkennen, wie unser Roboter seine Umwelt mittels seines Farbsensors wahrnimmt, benötigen wir ein Programm:- Dieses soll den Wert des Abstands anzeigen, der zwischen dem Ultraschallsensor und dem Hindernis (verschiebbarer Block) liegt.
- Wenn sich der Abstand verändert, soll das Programm auch den daraus resultierenden neuen Wert anzeigen.
Lösungsvorschlag
3. Automatisches Bremssystem
Ziel ist es unser Programm durch dessen Hilfe der Roboter bereits der schwarzen Linie folgt zu erweitern:
- Der Roboter soll der Linie nur weiter folgen, wenn im Abstand von 10 [cm] von ihm kein Hindernis im Weg steht.
- Die nachfolgende Animation kann dir dazu eine Anregung geben.
Open Roberta Lab: Nur nicht gegen die Wand fahren from Franz Dippl on Vimeo.
Solltest du keine Idee haben, wie du das Programm dazu umsetzen könntest, findest du nachfolgend mehrere Lösungsanregungen:
Lösungsanregung
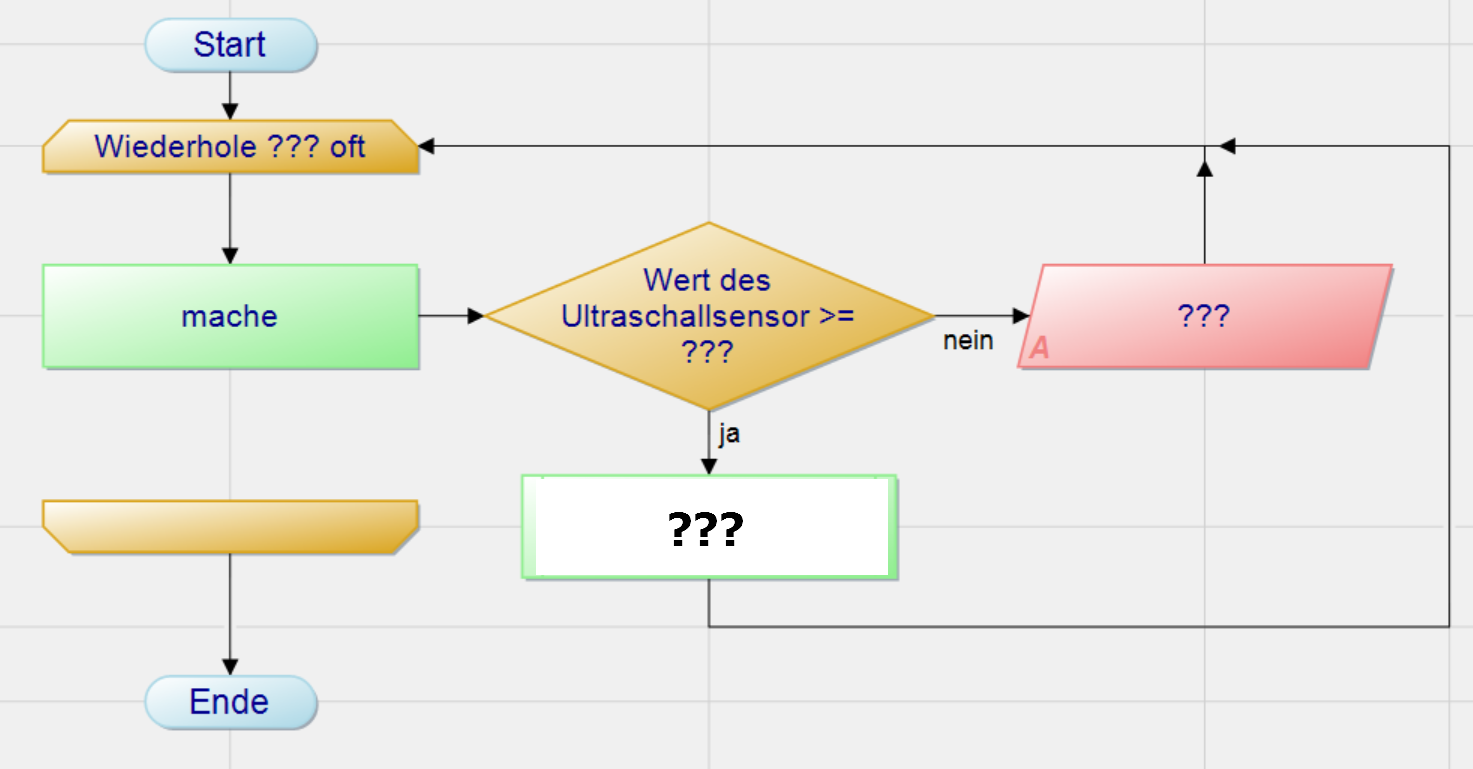
Die Abbildung zeigt dir einen noch unvollständigen Programmablaufplan. Überlege dir zunächst, welche Angaben noch fehlen, übertrage dann den vollständigen Ablaufplan auf ein Blatt Papier und erstelle dann mit dessen Hilfe das Programm.
Lösungsanregung
Die Abbildung zeigt dir einen noch unvollständigen Programmablaufplan. Überlege dir zunächst, welche Angaben noch fehlen, übertrage dann den vollständigen Ablaufplan auf ein Blatt Papier und erstelle dann mit dessen Hilfe das Programm.
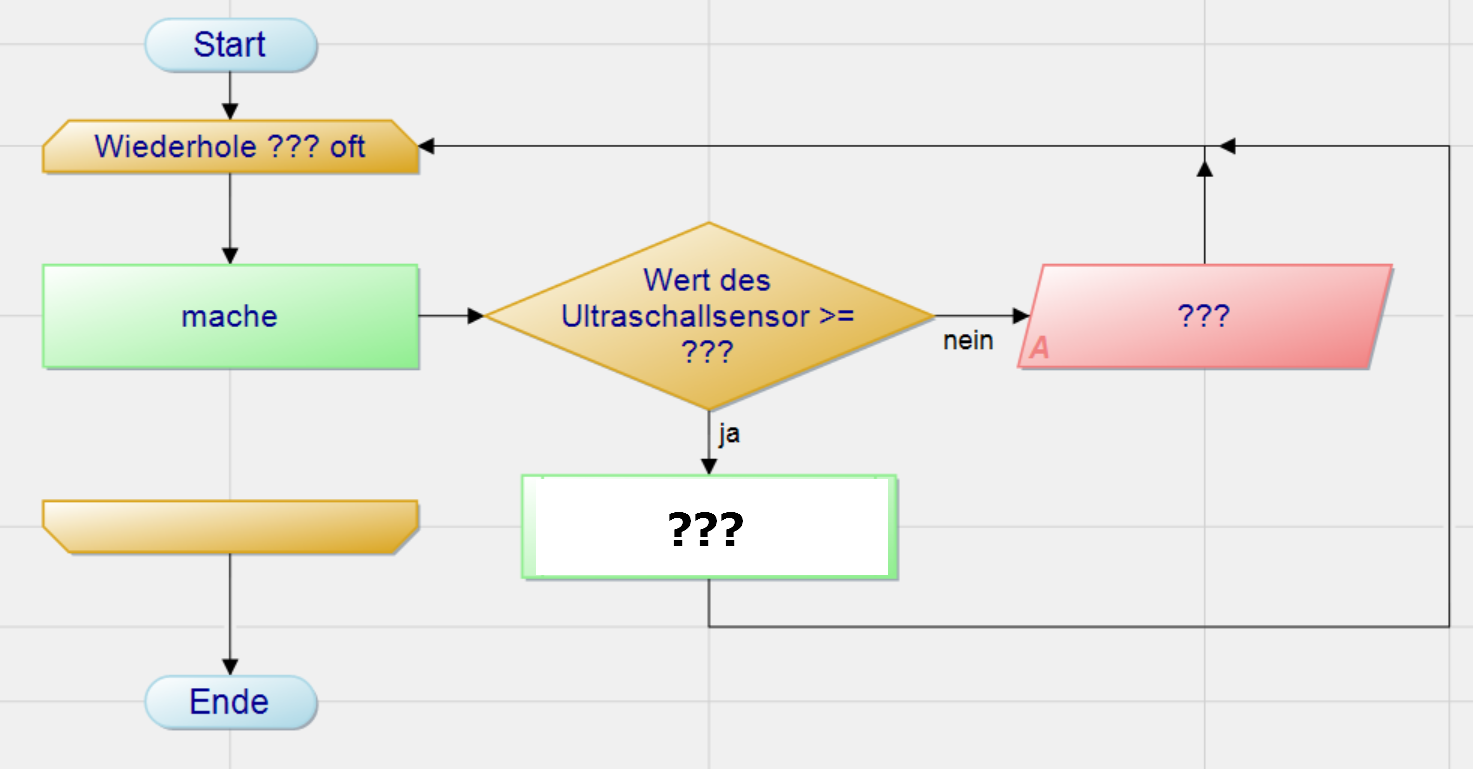
Zusätzlicher Tipp:
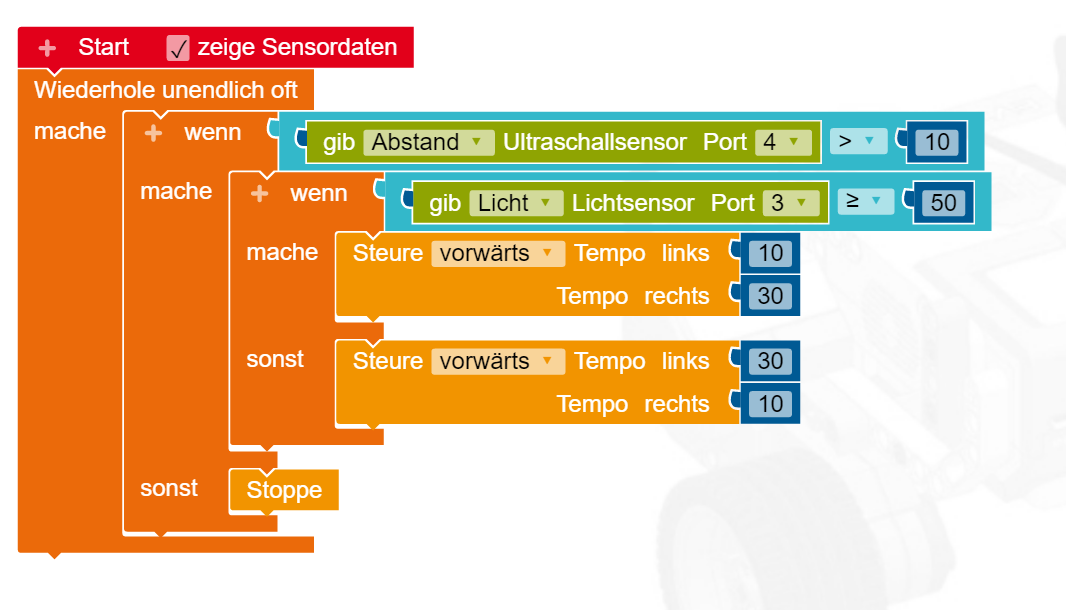
Lass den Roboter in Abhängigkeit des gemessenen Wertes des Ultraschallsensors entweder in einem Unterprogramm der Linie folgen oder einen Stopp der Motoren ausführen. Die Entscheidung, ob der Linie gefolgt werden soll oder ein Stopp der Motoren stattfindet, soll unendlich oft und immer wieder hintereinander getroffen werden.
Lösungsanregung

Die Abbildung zeigt dir einen möglichen Programmablaufplan zur Lösung der Aufgabe. Übertrage diesen auf ein Blatt Papier und erstelle dann mit dessen Hilfe das Programm.
3.1. Mgl. Lösung
Mögliche Lösung