Sensoren
1. Allgemeines
Grundlagen
Sensoren machen das Tüfteln und Programmieren mit deinem Roboter erst richtig interessant. Sensoren ermöglichen es Roberta, mit ihrer Umwelt zu interagieren und auf bestimmte Ereignisse und Zustände zu reagieren.
Die Kategorie "Sensoren" beinhaltet Blöcke für alle Standardsensoren des EV3-Systems:
- Berührungssensor
- Lichtsensor
- Ultraschallsensor
- Infrarotsensor
- Drehsensor (Motor-Encoder)
- Kreiselsensor (Gyroskop)
- Tasten
- Zeitgeber
Eine Besonderheit der "Sensor-Blöcke" im Unterschied zu den "Aktion-Blöcken" ist, dass alle "Sensor-Blöcke" einen "Wert" zurückgeben oder den Sensor zurücksetzen. Den Wert-Typ, den ein Sensor-Block zurückgibt, erkennst du an der Farbe des Konnektors. Der Konnektor ist das Verbindungsstück, mit denen NEPO-Blöcke in andere Blöcke eingefügt werden können. 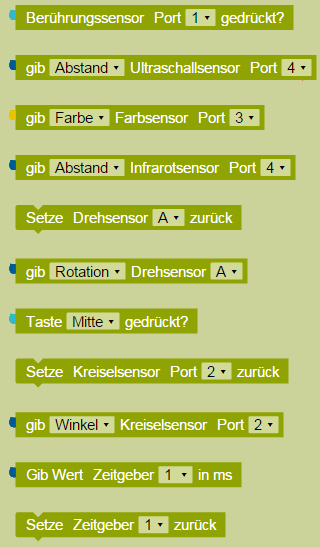
Robertakonfiguration
Im Menüpunkt "Robertakonfiguration" kannst du dir anzeigen lassen, welcher Sensor an welchem Port angeschlossen ist:
Sensor Statusanzeige
Programmiert man einen Sensor (z. B. den Farbsensor) ist es oft hilfreich die gemessenen Werte direkt im Display des Roboters angezeigt zu bekommen. Dies kann einem beispielsweise dabei helfen einen Linienfolge-Roboter zu programmieren oder den korrekten Abstand zu einem Objekt zu messen.

In den nachfolgenden Kapiteln erklären wir die Funktion des Berührungssensors, des Kreiselsensors, des Lichtsensors und des Ultraschallsensors, da diese im Roberta Basismodell (und der Simulationsumgebung) vorhanden sind.
Weitergehende Informationen zu den restlichen Sensoren findest du hier.